"動手學科學/物質科學I/動位能轉換(一)" 修訂間的差異
(→原理) |
(→原理) |
||
| 行 24: | 行 24: | ||
#「腳掌圓弧」原則:前、後腳的「腳掌」是圓弧形的,不是平的。平的腳掌很難成功。 | #「腳掌圓弧」原則:前、後腳的「腳掌」是圓弧形的,不是平的。平的腳掌很難成功。 | ||
#運動過程以腳掌為「支點」,隨著下坡的運動過程,前腳、後腳交替接觸斜坡,支點也隨之改變。 | #運動過程以腳掌為「支點」,隨著下坡的運動過程,前腳、後腳交替接觸斜坡,支點也隨之改變。 | ||
| + | ====相關物理==== | ||
| + | 動能 | ||
| + | PE = mgh | ||
| + | |||
| + | 位能 | ||
| + | KE = 1/2mv^2 | ||
===動手做活動=== | ===動手做活動=== | ||
於 2019年11月12日 (二) 08:51 的修訂
目錄
課程目標
用簡單的實驗與勞作,加上生活中的體驗,讓同學們了解物理中的重心、動能、位能、加速度。
先備知識
- 重心是什麼?
- 什麼是動能?
- 什麼是位能?
- 動位能轉換與能量守恆
原理
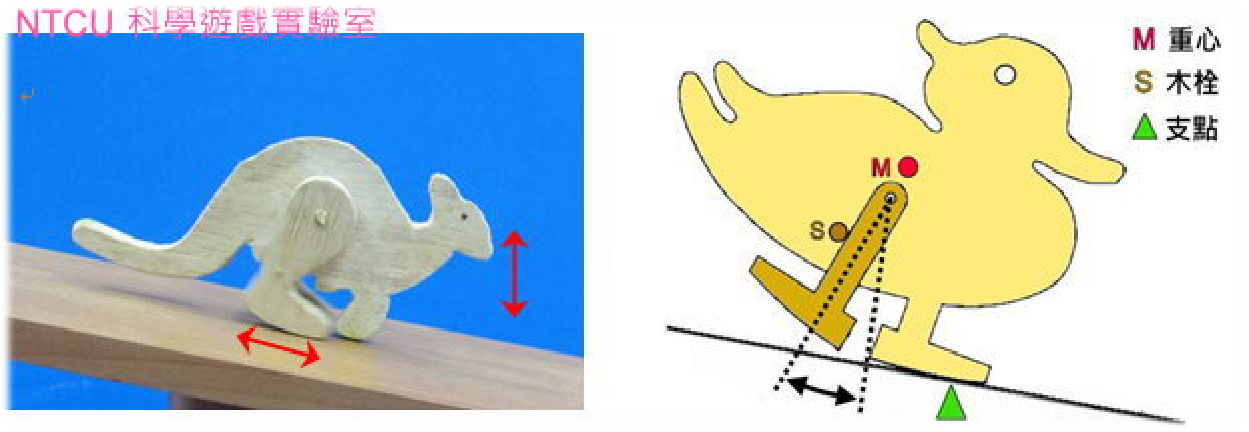
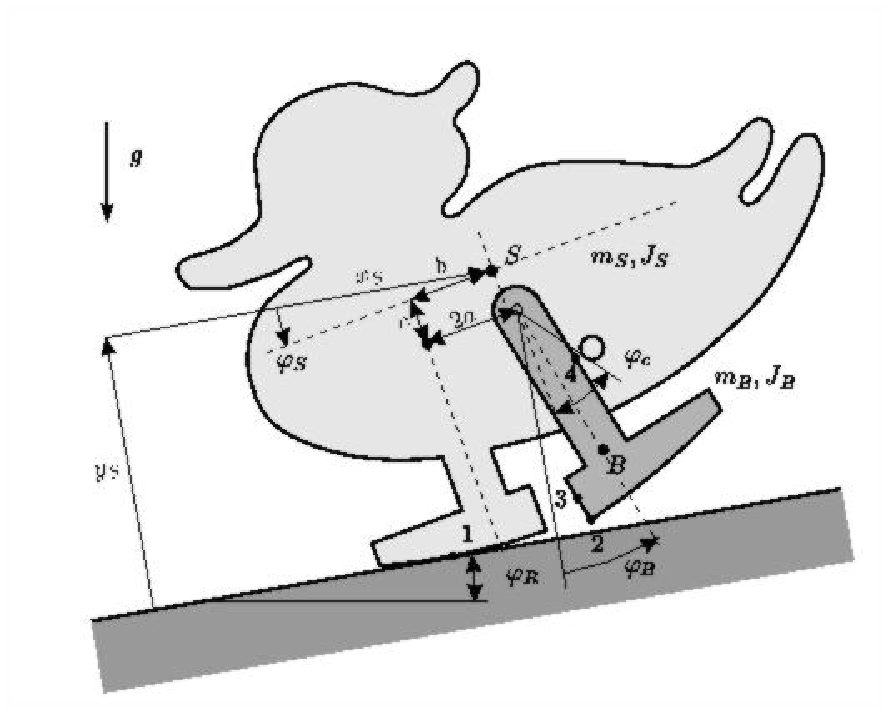
玩具結構:
- 前腳的身體
- 能轉動的後腳
下坡原則
- 「後重心」原則:物體的重心在前腳的後面,靠近後腳,但不能超過後腳。
- 「有限轉動」原則:後腳可以往前、往後轉動,但是轉動角度在一定的範圍內。當後腳往前轉動,會碰到前腳而停止;而往後轉動則會撞到位於S點的木栓而停止。
- 「腳掌圓弧」原則:前、後腳的「腳掌」是圓弧形的,不是平的。平的腳掌很難成功。
- 運動過程以腳掌為「支點」,隨著下坡的運動過程,前腳、後腳交替接觸斜坡,支點也隨之改變。
相關物理
動能
PE = mgh
位能
KE = 1/2mv^2
動手做活動
學分活動
平衡鳥
下坡玩具
動能
PE = mgh
位能
KE = 1/2mv^2
牛頓擺
參與活動
平衡鳥
下坡玩具
黏土平衡玩具
探究問題
- 生活中有什麼地方能看到能量的傳遞?
- 生活中的平衡現象